
Pathfinding is a crucial drawback in lots of purposes. On this article, we’re going to have a look at some choices for pathfinding within the Rust language.
What we’ll cowl:
What’s pathfinding?
Merely put, pathfinding is discovering the shortest route between two factors. Within the easiest case, the reply is “a straight line,” however issues can get way more difficult that that!
Some examples of complicating elements are:
- Obstacles that may’t be moved by means of
- Terrain that’s tougher to maneuver by means of
For instance, to deal with terrain that’s tougher to maneuver by means of, you may give the 2 factors a price to maneuver by means of. You might then change the objective to be discovering the route between these two factors with the bottom value.
Usages of pathfinding
Pathfinding is utilized in many purposes. A few of the most typical ones are robotics and video video games, corresponding to roguelike video games.
In robotics, a typical activity for robots is to navigate the atmosphere and get from level A to level B as shortly as attainable.
In video video games, a personality managed by the pc may have to maneuver locations within the atmosphere. Additionally, if the sport permits the participant to set waypoints, it might additionally wish to present the quickest method to get to the subsequent waypoint.
Pathfinding examples in Rust
Now that we’ve established the usefulness of pathfinding, let’s check out a couple of examples of pathfinding in Rust, an more and more fashionable programming language.
For these examples, we’re going to be utilizing the aptly-named pathfinding crate, which is the most well-liked pathfinding crate accessible on the Rust neighborhood’s crate registry.
Observe that the majority pathfinding algorithms work by way of nodes as a substitute of steady house. This Recreation Developer article discusses some methods to make the outcomes of those algorithms look extra pure.
Instance Rust pathfinding framework
You’ll be able to try the full code we’re going to be utilizing on this GitHub repo.
The Board struct defines an oblong board the place every cell may be an impediment or have a price related to shifting to it.
Board::new() permits creating the board and specifying these cells with a Vec<string>. On this string, a personality with a price between one and 9 signifies a cell that may be moved to on the outlined value. In the meantime, a personality of “X” signifies an impediment.
Observe that these algorithms help having one-way hyperlinks between cells. For simplicity, we’re not going to permit that performance within the Board struct.
Board::get_successors() takes in a cell place and returns a Vec of cells that may be immediately moved to together with their value. As we’ll see, this can be a key methodology utilized in the entire algorithms we’re going to have a look at within the pathfinding crate.
There’s additionally Board::draw_to_image(), which is a handy method to write a picture with the Board cells — and optionally, a path as nicely. This methodology makes use of the imageproc crate to do the drawing.
Utilizing breadth-first seek for pathfinding in Rust
Breadth-first search is a reasonably simple algorithm for locating a shortest path from a begin node to a objective node. Beginning initially node, it processes every related node at a time.
If that node is the objective node, then we’re accomplished! In any other case, we put every of its connections within the queue of nodes to have a look at and proceed.
The breadth-first search algorithm doesn’t take a look at the prices of nodes, nevertheless it’s a reasonably easy instance to start out with. You’ll be able to try the full supply for this instance utilizing breadth-first search to observe alongside.
The code under exhibits the decision to really do the breadth-first search:
let outcome = bfs(
&begin,
|p| board.get_successors(p).iter().map(|successor| successor.pos).acquire::<Vec<_>>(),
|p| *p==objective);
Per the documentation for bfs(), the arguments are:
- The node to start out with
- A operate that takes in a node and returns a
Vecof nodes that may be immediately moved to - A operate that takes in a node and returns whether or not it’s the objective node
Observe that since breadth-first search doesn’t help prices for nodes, we now have to map the results of Board::get_successors() to take away the prices.
Moreover, because the documentation notes, taking in a node and returning whether or not it’s the objective node is extra versatile than simply taking in what the objective node is. It’s because it permits for a number of objective nodes, or some form of dynamic computation for whether or not a node is a objective or not.
On this case, we simply need one objective node, and that’s simple to do as nicely!
bfs() returns Choice<Vec<N>> the place N is the kind of the node you handed in. It’s an Choice<> as a result of it’s attainable there isn’t a path from begin to the objective; in that case None is returned. In any other case, it returns a Vec of the trail to get from the begin to the objective, together with each endpoints.
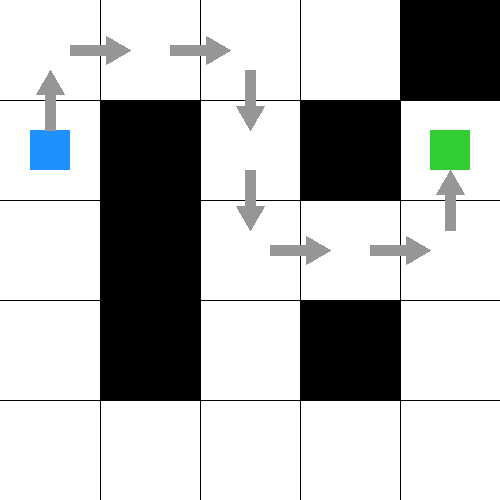
To run the instance, use cargo run --bin bfs. Right here’s the ensuing picture exhibiting the trail from the beginning (blue) node to the objective (inexperienced) node:
Accounting for prices in Rust pathfinding with Dijkstra’s algorithm
Dijkstra’s algorithm is one other algorithm for locating a shortest path from a begin node to a objective node. In contrast to breadth-first search, it does use the price of shifting to a node in its calculations.
Be certain to try the full supply for this instance utilizing Dijkstra’s algorithm.
Right here’s the decision to run Dijkstra’s algorithm:
let outcome = dijkstra(
&begin,
|p| board.get_successors(p).iter().map(|s| (s.pos, s.value)).acquire::<Vec<_>>(),
|p| *p==objective);
Per the documentation for dijkstra(), the arguments are similar to bfs(). The one distinction is that the second argument is now a Vec of tuples, every one in every of which accommodates the next:
- A node that may be immediately moved to
- The price to maneuver to that node
Once more, just like bfs(), dijkstra() returns Choice<(Vec<N>, C)>; the second member of the tuple is the entire value to get from the beginning node to the objective node.
To run the instance, use cargo run --bin dijkstra, and right here’s the ensuing picture exhibiting the trail from the beginning node (the one with the blue quantity) to the objective node (the one with the inexperienced quantity):
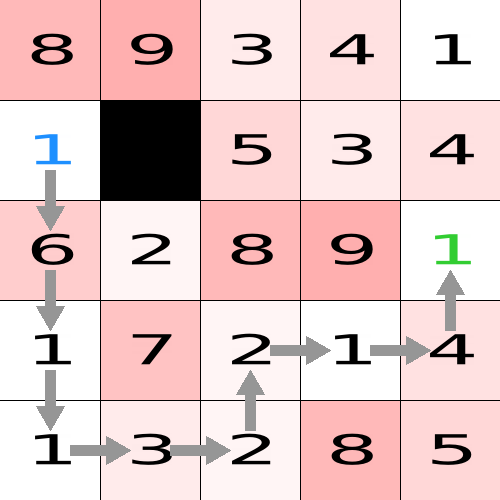
Discover how the trail is a little more roundabout than a direct path due to the prices of the nodes.
Rust pathfinding utilizing the A* search algorithm
Each of the earlier searches we’ve checked out begin out by attempting each related node. Nonetheless, there’s typically extra construction in the issue that these algorithms aren’t making the most of.
For instance, in case your objective node is immediately west of your begin node, it most likely is smart for the primary transfer to be within the westward path!
The A* search algorithm (pronounced “A-star”) takes benefit of this additional construction. It requires that you simply go in a heuristic operate that estimates the gap from a node to the objective, and that this estimate is at all times lower than or equal to the precise distance.
Utilizing this heuristic, the A* search algorithm can attempt paths which can be extra prone to be decrease in value first. It might probably additionally determine when it may well cease as a result of there may be no shorter path.
As a warning: if the heuristic doesn’t obey this property, the algorithm won’t return the shortest path! For those who’re involved about this, you’ll be able to run some take a look at instances with Dijkstra’s algorithm and ensure that A* and Dijkstra’s algorithm give the identical outcome to ensure the heuristic is legitimate.
Typically, for those who’re doing pathfinding in a two-dimensional house, a heuristic that ignores value and simply calculates the gap between the 2 nodes works nicely.
For our instance Board, we’re not permitting diagonal strikes, so the gap between two cells is the Manhattan distance. For the reason that minimal value to get to any cell is 1, we are able to use this as our heuristic.
Right here’s the full supply for this instance utilizing the A* search algorithm, and right here’s the decision to run it:
let outcome = astar(
&begin,
|p| board.get_successors(p).iter().map(|s| (s.pos, s.value)).acquire::<Vec<_>>(),
|p| ((p.0 - objective.0).abs() + (p.1 - objective.1).abs()) as u32,
|p| *p==objective);
Per the documentation for astar(), the arguments and return worth are the identical as for dijkstra() aside from the heuristic operate, which is the third parameter.
As talked about above, we’re utilizing the Manhattan distance between the cells for the heuristic, which is the distinction between the x-values plus the distinction between the y-values.
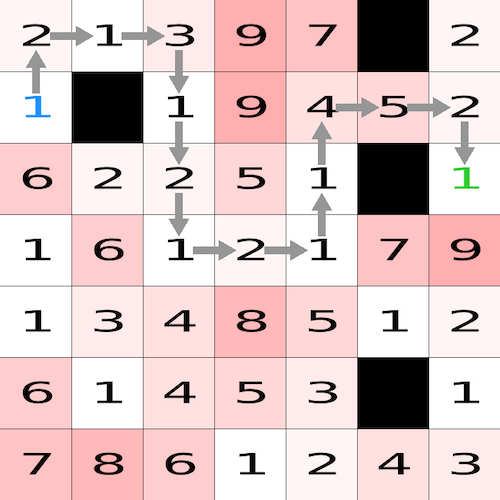
To run the instance, use cargo run --bin astar. Right here’s the ensuing picture:
Conclusion
In terms of pathfinding in Rust, A* search is usually utilized in robotics and online game purposes. Nonetheless, one weak point of A* search is that it may well take lots of reminiscence to run.
There are variants corresponding to iterative deepening A* search and fringe search that enhance on its reminiscence utilization, and the pathfinding crate has help for each of those with the idastar() and fringe() strategies. These strategies take the identical parameters because the astar() methodology above, in order that they’re simple to check out.
For those who’re seeking to do some pathfinding in Rust, clone the repo and provides it a shot!
LogRocket: Full visibility into manufacturing Rust apps
Debugging Rust purposes may be tough, particularly when customers expertise points which can be tough to breed. For those who’re concerned with monitoring and monitoring efficiency of your Rust apps, routinely surfacing errors, and monitoring gradual community requests and cargo time, attempt LogRocket. 
LogRocket is sort of a DVR for internet and cellular apps, recording actually the whole lot that occurs in your Rust app. As an alternative of guessing why issues occur, you’ll be able to combination and report on what state your utility was in when a problem occurred. LogRocket additionally displays your app’s efficiency, reporting metrics like consumer CPU load, consumer reminiscence utilization, and extra.
Modernize the way you debug your Rust apps — begin monitoring at no cost.

{kind=link}