
Robotics is part of at this time’s communication. These days many industries are utilizing robots, attributable to their excessive stage of efficiency, which is a good assist for human society additionally. Likewise in lots of industries, we now have seen heavy elements which they’ve to maneuver from one place to a different place, which isn’t attainable with out the assistance of machines. So together with this drawback, we now have introduced again the development of an answer, that’s impediment avoiding robotic. It’s designed to permit the robotic to navigate in an unknown atmosphere by avoiding collisions. Impediment avoidance in robots can convey extra flexibility in various environments and it could be rather more environment friendly for us. So steady human monitoring isn’t required for this robotic.

Methodology:
The principle precept of our mission is the idea of the sensor. First, the transmitter despatched a sign of 8 sonic bursts at forty kilohertz. Then this sign will get mirrored again to the receiver if an object is positioned in entrance of the sensor. Afterward, the mirrored sign will get obtained by the receiver. So through the use of this system, the ultrasonic waves constantly calculate the space between the automotive and the mirrored objects. This automotive has the capability to detect the impediment in its path, every time the item is in entrance of the automotive. Ultrasonic sensors generate high-frequency sound waves and consider the echo, which is obtained again to the receiver. After the impediment detection, the automotive would change its route by making autonomous selections, as a result of it’s an autonomous robotic. It will possibly measure the space between itself and surrounding objects in real-time. So it’s actually a helpful one the place human penetration could possibly be deadly.
Elements Required
- Arduino UNO
- Motor Driver Defend
- Wheels (4x)
- Gear Motor (4x)
- Servo motor
- Ultrasonic sensor
- Sensor stand
- Lipo Battery
- Acrylic sheet
- Male and Feminine jumper wire
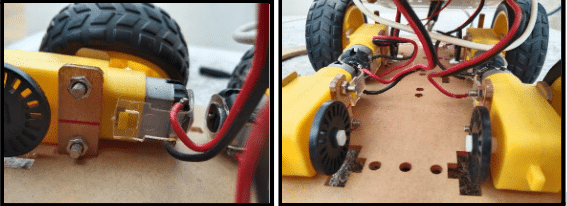
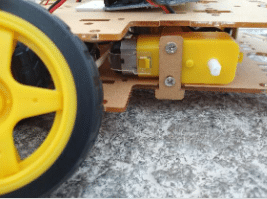
Step 1: Assembling The Chasis
- Solder the wire to constructive and GND of DC gear motor
- Connect the DC gear motors to the underside of the chasis
- Connect the wheel to the DC motors
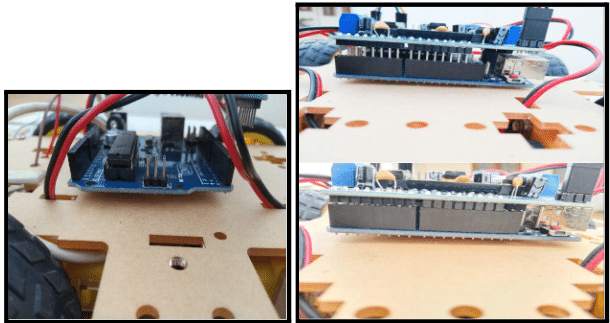
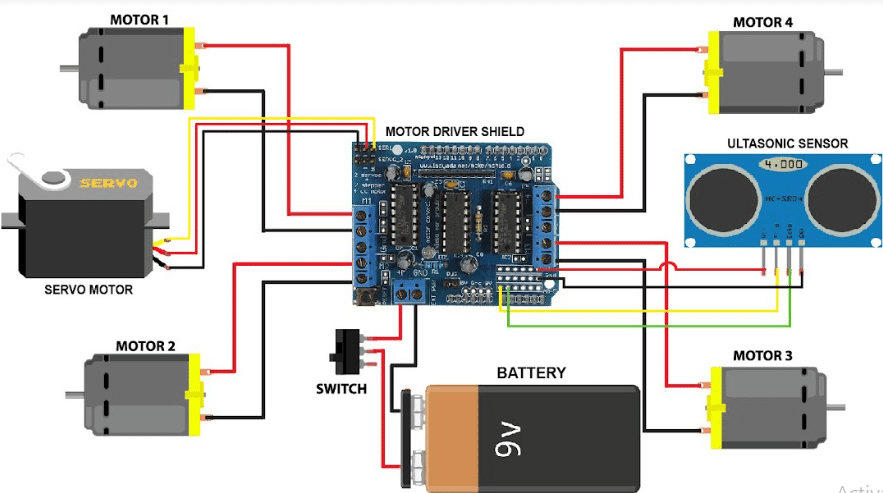
Step 2: Mount The Elements
- Screw your Arduino onto your high chassis
- Then plug your motor driver defend into your Arduino
- Motor is related to the proper pair of terminals, the entrance motors to the entrance terminals of motor defend, and the again motors to the again terminals of motor defend.
Step 3: Setup The Servo
- Connect the servo on the highest of the chassis
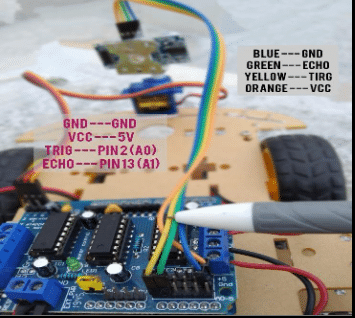
- Plug the servo into the servo 1 (SER1) header pins on the defend
- GND-> GND
- Vcc -> 5V
- TRIG -> pin 2 (AO)
- ECHO -> pin 13 (A1)
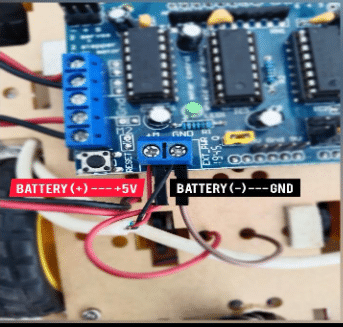
Step 4: Energy The Robotic
Join the Lipo battery to the L293d motor driver as follows:
- Lipo battery (+) → +12V
- Lipo battery (- ) → GND
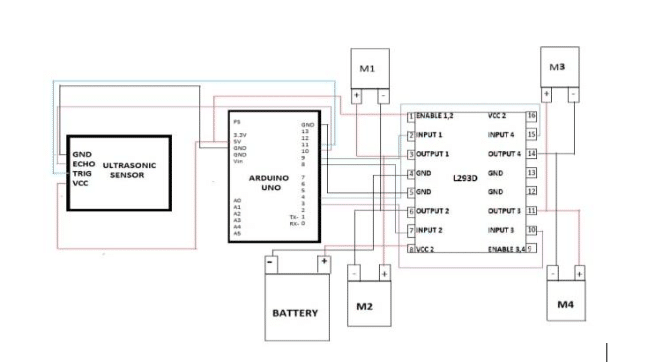
Connections:
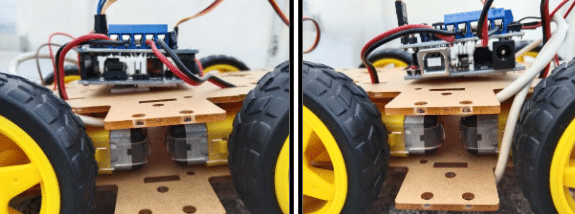
Testing The Robotic

Now the robotic is able to keep away from any impediment !

{kind=link}