Centimeter-scale garden mower positioning with out GPS RTK
— July twenty seventh, 2022
GPS is ideal for navigating roads, as a result of that doesn’t require a lot precision. However GPS is just correct to a number of meters, which implies that it’s unsuitable for functions that require extra exact positioning. GPS RTK (real-time kinematic) methods can obtain a lot better accuracy, however they’re complicated and require a subscription to a correction service. Viktor Kurusa wanted correct positioning for his robotic garden mower, however didn’t need to resort to GPS RTK. As an alternative, he used a couple of Arduino boards to allow UWB ranging for centimeter-scale positioning.
UWB (ultra-wideband) is a radio expertise that the FCC opened up for shopper and business functions in 2002. It’s preferrred for transmitting massive quantities of information at quick ranges. It is usually doable to make use of UWB to calculate distances by measuring the ToF (time of flight) between a “tag” gadget and an “anchor” gadget. Utilizing two anchor units, one can triangulate the place of the tag on a 2D airplane. With three anchors, one can decide the tag’s precise location in 3D house.
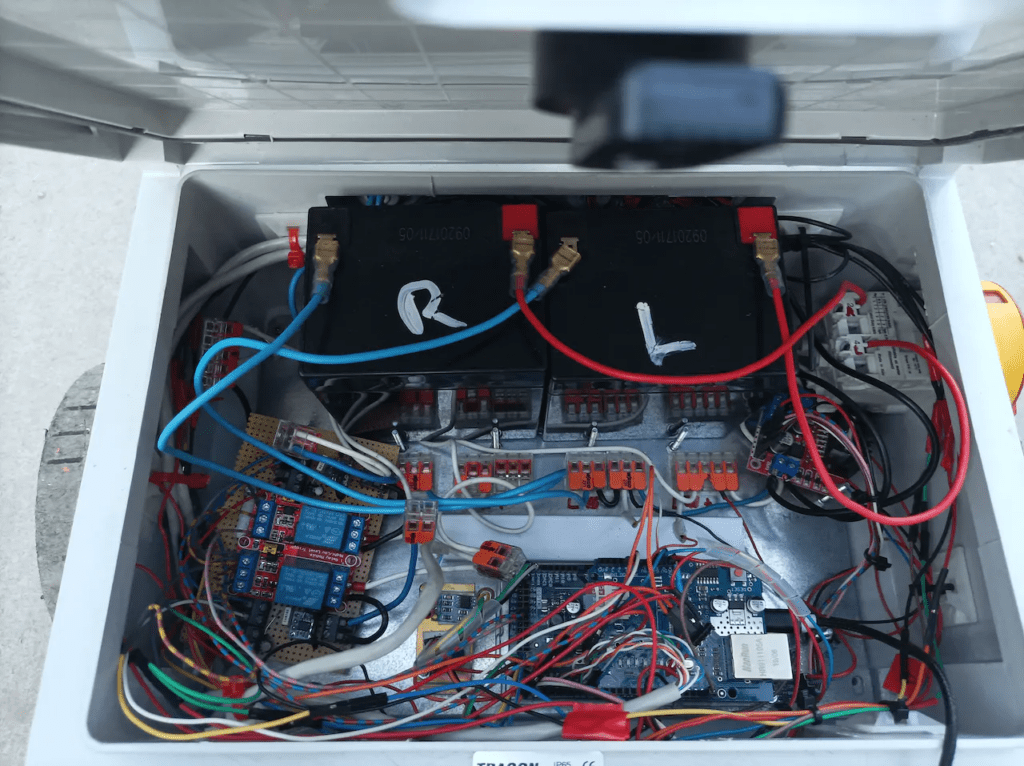
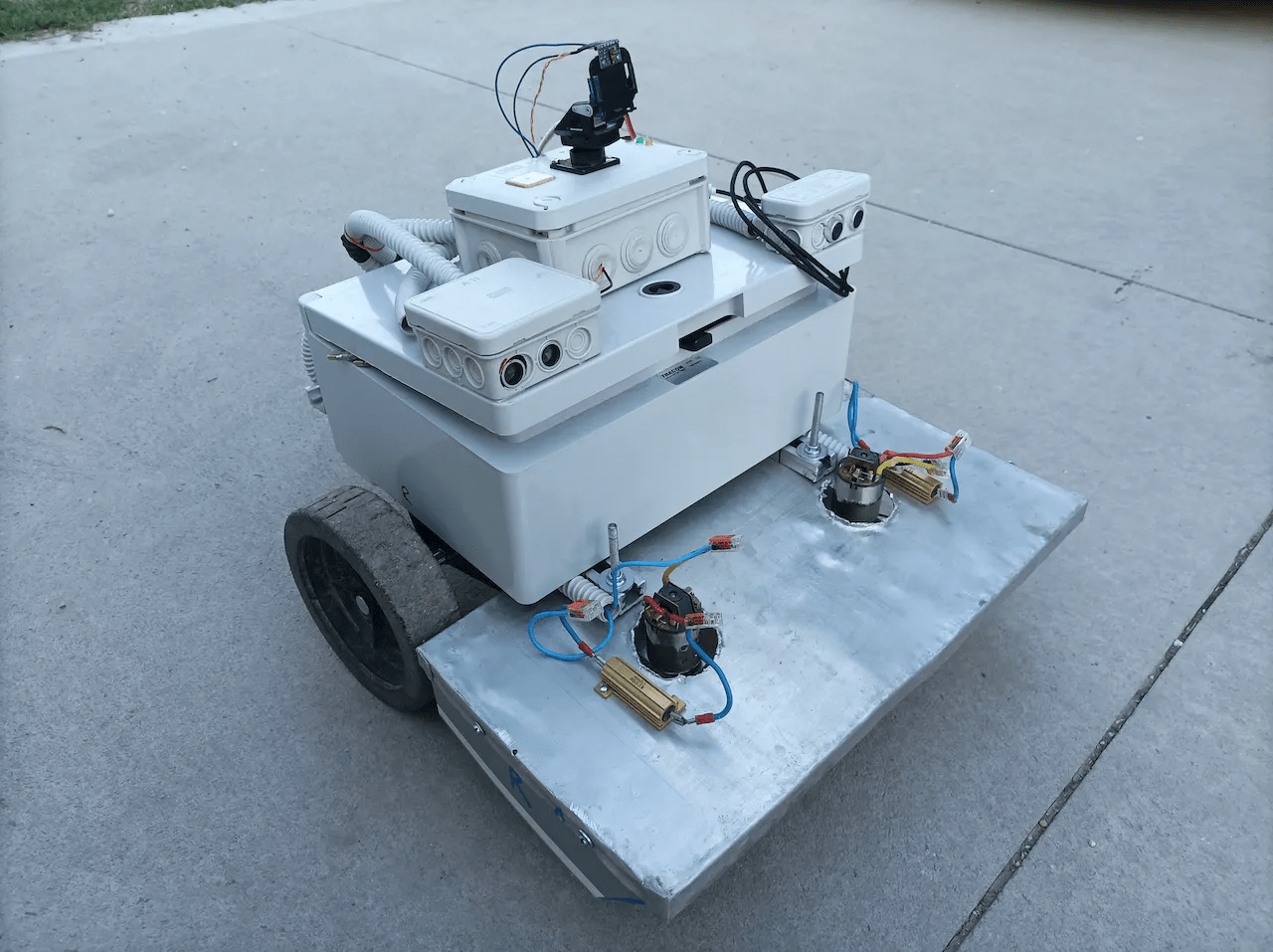
Kurusa used this UWB positioning functionality for his robotic garden mower’s navigation. The garden mower incorporates a number of boards: an Arduino Due, two Nanos, and 4 SparkFun Arduino Professional Minis. The latter 4 boards hook up with Decawave DMW1000 UWB transceiver modules — three of them for the distant anchors and certainly one of them for the onboard tag. The Due board acts as the first onboard controller and runs FreeRTOS, screens an MPU6050 accelerometer, and drives the robotic’s motors by an H-bridge. One Nano board interfaces with ultrasonic sensors for impediment avoidance and the second Nano screens a LIDAR sensor, which the system checks if the ultrasonic sensors detect an impediment.
With all of that {hardware} working in live performance, Kurusa has a robotic lawnmower with a classy sensor array. It is aware of precisely the place it’s within the yard, which lets it precisely observe paths whereas mowing. If one thing surprising enter’s the mower’s path, akin to a child’s soccer ball, the mower will detect it and try and navigate round it.
You possibly can observe any responses to this entry by the RSS 2.0 feed.
You possibly can depart a response, or trackback from your personal website.

{kind=link}