
Can Arduino assist with tightrope strolling?
— June seventeenth, 2022
Strolling a tightrope does take ability and pure stability, however it’s actually a matter of inertia. This is the reason you see acrobats carrying lengthy poles on the excessive wire — the burden and size of the pole creates inertia that gravity should overcome with a view to topple the performer. However these poles are unwieldy. To seek out out if he may obtain the identical factor in a extra compact package deal, James Bruton constructed this unusual Arduino-controlled balancing backpack.
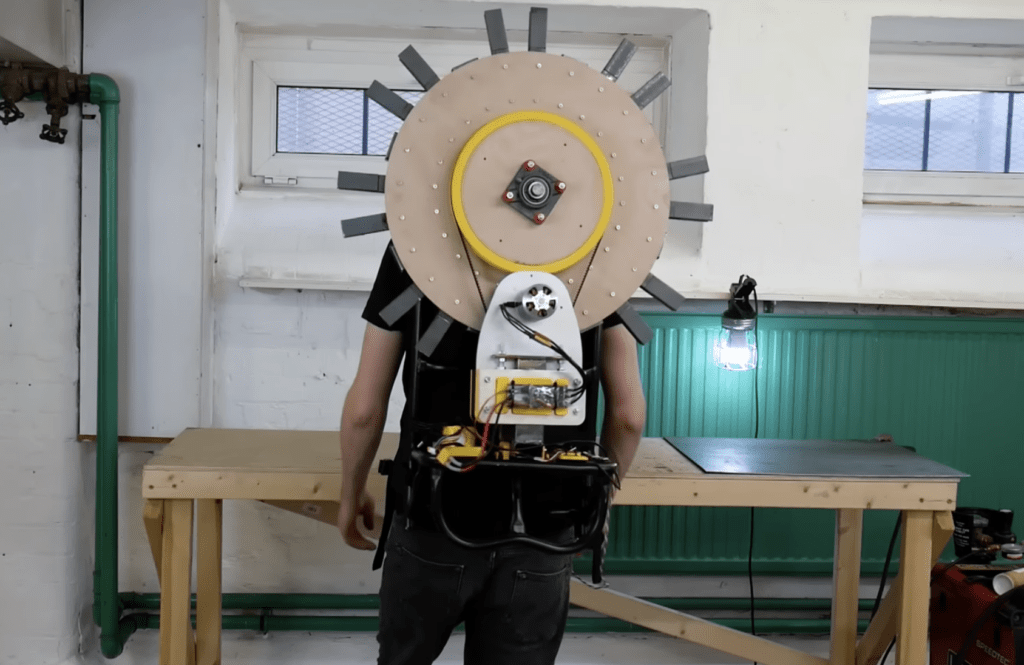
Bruton has one thing of a fascination with self-balancing robots. His expertise in that enviornment carried over right here, as a result of the backpack works so much like a self-balancing robotic. A weighted response wheel spins both clockwise or counter-clockwise, which is able to create rotational inertia to compensate for roll (left or proper tilt). However as an alternative of holding a robotic upright, this inertial mechanism sits on a backpack that Bruton can put on to remain upright as he makes an attempt to stroll alongside a beam.

An Arduino-compatible Teensy LC measures the angle of the backpack utilizing an MPU-6050 inertial measurement unit (IMU). The board additionally controls a big brushless DC motor, which spins the response wheel by a belt drive that gears down the mechanism. Energy comes from an enormous pastime LiPo battery pack. Bruton added a hand throttle as nicely, which lets him modify the pace of the response wheel. With out that, the system would struggle his personal pure motion. With it, he can improve the throttle as essential when he begins falling to at least one facet or the opposite.
After some preliminary hiccups brought on by the response wheel missing the mass to assist, Bruton was in a position to navigate the stability beam efficiently.
You possibly can comply with any responses to this entry by the RSS 2.0 feed.
You possibly can go away a response, or trackback from your personal web site.

{kind=link}