Improve a robotic arm’s payload capability by relocating its wrist motors
— November ninth, 2022
To present an electrical automotive extra vary, you want a much bigger battery pack. However that provides weight, so that you want larger motors and extra battery capability to compensate. This creates a vicious cycle and robotic arms are inclined to the same downside. A robotic arm must elevate its personal weight along with no matter it picks up. Greater motors to extend the payload capability additionally enhance weight, thereby lowering the payload capability. This video from RoTechnic describes how you can sidestep that cycle with distant motors.
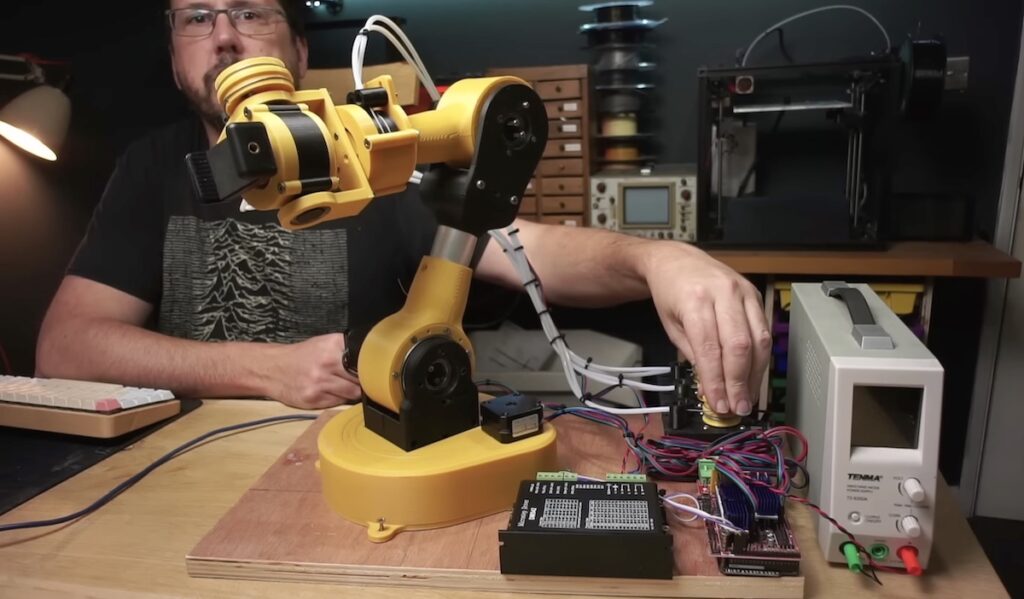
RoTechnic’s robotic arm has six levels of freedom (DoF): a rotating base, a shoulder joint, an elbow joint, a rotating wrist joint, a tilting wrist joint, and a rotating finish effector. If the robotic have been a traditional design, all of these joints (besides the primary two) would require a motor that provides levered weight to elevate. The load of these motors would subtract from the quantity that the arm may in any other case elevate. However three of this robotic’s motors sit on the desk close by in order that it doesn’t have to elevate them.

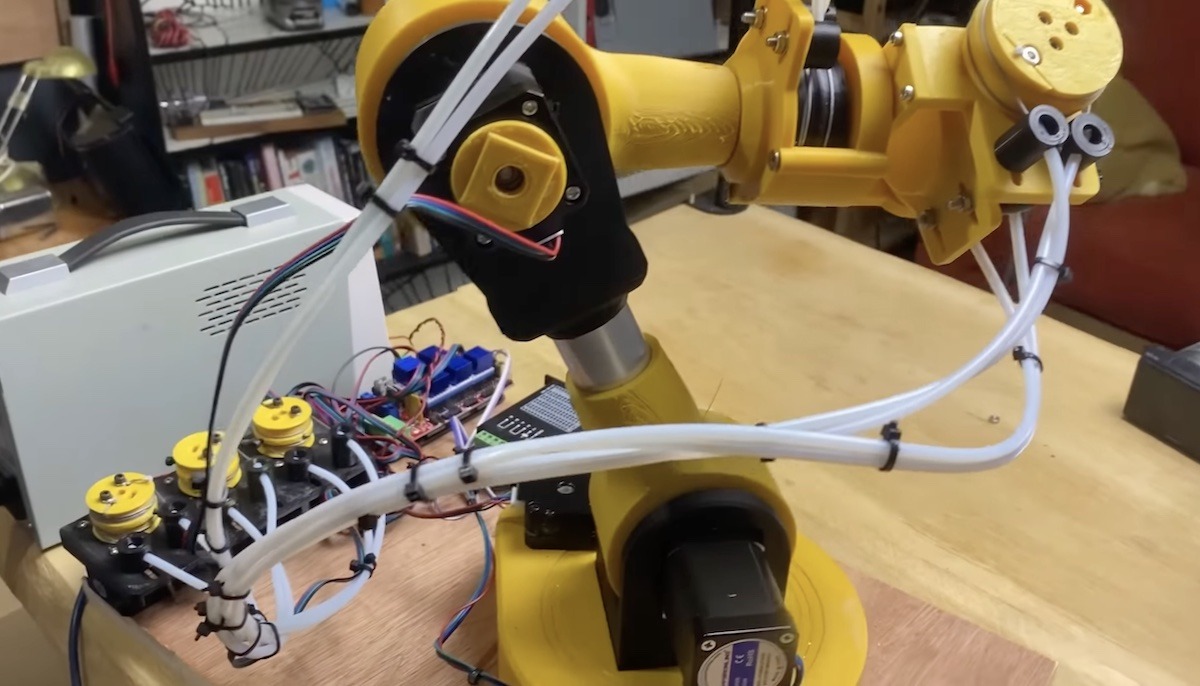
RoTechnic used an Arduino Mega 2560 board to manage these motors. Many of the robotic’s different components have been 3D-printed. A number of the motors, like for base rotation and the shoulder joint, stay within the standard location. However three of the motors actuate their joints by way of fishing traces fed by way of Bowden tubes. The motors have spools and when these rotate they loosen one line whereas tightening the opposite. Every joint has the same spool, so the fishing traces flip them. The one limitation is {that a} joint can’t rotate indefinitely, however one can mitigate that by looping the fishing line round every spool many occasions to offer an equal variety of revolutions.
This method has been in use within the robotics business for longer than pc management and isn’t groundbreaking. However RoTechnic’s construct demonstrates how simple it’s for hobbyists to combine the approach into their robotic designs.
You possibly can observe any responses to this entry by way of the RSS 2.0 feed.
You possibly can depart a response, or trackback from your personal web site.

{kind=link}